
showObjectBounds()
Purpose
Display and configure the collision boundaries of a 3D object
Syntax
showObjectBounds( enabled, colour, thickness )Arguments
enabled True/false value to display the boundaries
colour Vector containing the RGBA (red, blue, green, alpha) values for the boundaries
thickness Float line thickness in pixels
Example
active = true
thickness = 1
colour = white
showObjectBounds( active, colour, thickness )
model = loadModel( "Kat Deak/Racecar_DogRacer" )
object = placeObject( model, {}, {3, 3, 3} )
c = controls( 0 )
oldc = c
setCamera( { -8, 3, 0 }, {} )
worldLight( { 0, -1, 0 }, white, 2 )
loop
clear()
c = controls( 0 )
thickness += c.ry
thickness = clamp( thickness, 0, 20 )
if c.a and !oldc.a then
active = !active
endif
if c.x and !oldc.x then
colour = { random(1.0), random(1.0), random(1.0), 1 }
endif
showObjectBounds( active, colour, thickness )
rotateObject( object, {0, 1, 0 }, .5 )
drawObjects()
oldc = c
printAt( 0, 0, "Push the right control stick up or down to adjust line thickness" )
printAt( 0, 2, "Thickness: ", thickness )
printAt( 0, 4, "Press the X button to randomise line colour" )
printAt( 0, 6, "Press the A button to set bounds visibility" )
printAt( 0, 8, "Bounds visibility: ", active)
update()
repeat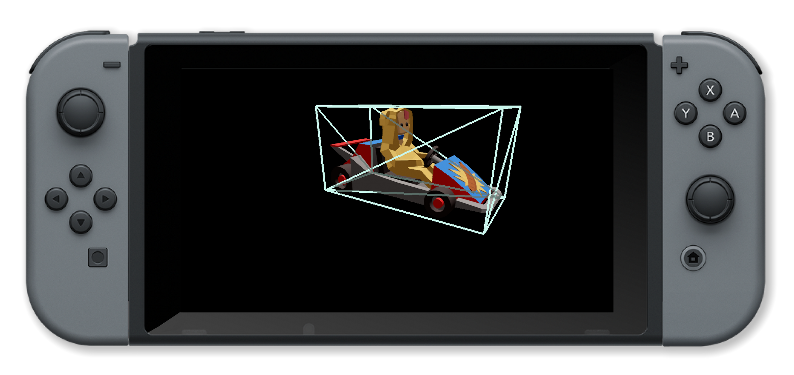
Associated Commands
drawObjects(), loadModel(), objectPointAt(), placeObject(), removeObject(), rotateObject(), setObjectCollisionScale(), setObjectMaterial(), setObjectPos()